Suppose are finite-dimensional vector spaces where . Then no linear maps from to is injective. Use the lemma above to show this which implies that so then there's other basis vectors that aren't zero in this space, so is not injective via Chapter 3 - Linear Maps#^ba1b7d.
If instead then no linear map from to is surjective as using the above theorem implies that so then so then is not surjective.
The multiplication of from to itself is not invertible because it is not surjective (1 is not in the range).
The backward shift linear map from to itself is not invertible because it is not injective ( is in the null space).
Isomorphic Vector Spaces
isomorphism, isomorphic
An isomorphism is an invertible linear map. Two vector spaces are isomorphic if there is an isomorphism from one vector space onto the other one.
We are essentially relabeling all the to some new label . Hence, this is why certain spaces are so similar to one another, like and . You might wonder if dimension has anything to do with it.
Dimension shows vector spaces as isomorphic
Two finite-dimensional vector spaces over are isomorphic iff they have the same dimension.
Proof
First, suppose and are isomorphic finite-dimensional vector spaces. Thus there exists an isomorphism . Because is invertible then and So then:
For the other way, suppose are finite-dimensional vector spaces with the same dimension. Then and are bases for respectively. Let be defined by:
Then is a well-defined linear map because is a basis for via Chapter 3 - Linear Maps#^9a80a8. Also, is surjective since spans . Furthermore since is LI, so is injective. Because is both injective and surjective, it's an isomorphism, so are isomorphic as desired.
☐
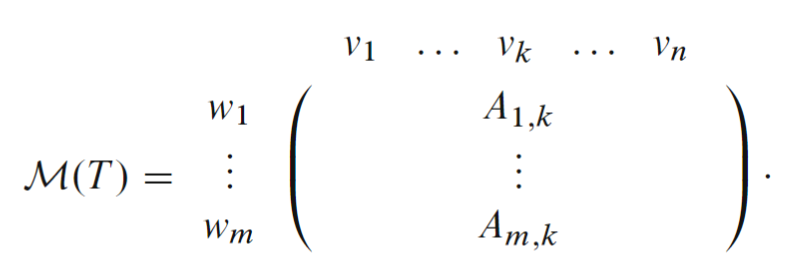
Thus any vector space where is isomorphic to . If is a basis for and is a basis for then for each we have a matrix . So in other words, once bases have been set for then is a function from to , so since via Chapter 3 - Linear Maps#^bfb9a4, then is invertible.
and are isomorphic
Suppose is a basis of and is a basis of . Then is an isomorphism between and .
Proof
We already noted that is linear. We need to prove that is injective and surjective.
With injectivity, if and then for all and because is a basis of this implies , showing as injective via Chapter 3 - Linear Maps#^ba1b7d.
For surjectivity, suppose . Let be the linear map from to such that:
A linear map from a vector space to itself is called an operator. The notation denotes the set of all operators on . In other words, .
Removing from this may suggest that we can remove one condition from bijectivity of , but recall from our earlier examples Chapter 3 - Linear Maps#^153ab0. But both of these are still not invertible despite being themselves operators. This is actually because both are infinite-dimensional vector spaces. But when they are finite dimensional, we get a remarkable result:
Injectivity is equivalent to surjectivity in finite dimensions
Suppose is finite-dimensional and . Then the following are equivalent:
is invertible
is injective
is surjective
Proof
Clearly if (i) holds then we get (ii, iii) for free. Suppose instead (ii) just holds. Then is injective so then so we just have the zero vector in the null space, so via the FTOLM:
so then implying surjectivity. So we get (iii), which gives us (i).
Instead if (iii) holds then is surjective, so so then via the FTOLM we have so then the null space is just the zero vector, showing injectivity. Hence is invertible.
☐